CIRCUITOS INTEGRADOS, COMPUERTAS LOGICAS, CONEXIÓN Y COMUNICACIÓN, REDES DE TELEFONIA
RAFAEL EDUARDO OSPITIA RENDON
ANDRES FELIPE MEDINA
INSTITUCIÓN EDUCATIVA MISAEL PASTRANA BORRERO
ÁREA: TECNOLOGÍA E INFORMÁTICA
LA PLATA – HUILA
2017
CIRCUITOS INTEGRADOS, COMPUERTAS LOGICAS, CONEXIÓN Y COMUNICACIÓN, REDES DE TELEFONIA
ANDRES FELIPE MEDINA
RAFAEL EDUARDO OSPITIA RENDON
Código: 15 -20 Grado: 10-02
Profesor: Ing. Álvaro valencia
INSTITUCIÓN EDUCATIVA MISAEL PASTRANA BORRERO
ÁREA: TECNOLOGÍA E INFORMÁTICA
LA PLATA – HUILA
2017
Nota de aceptación:
La plata – Huila (19 de septiembre del 2017)
CONTENIDO
INTRODUCCION
1. CIRCUITOS INTEGRADOS
1.1 circuitos monolíticos
1.2 circuitos híbridos de capa fina
1.3 circuitos híbridos de capa gruesa
1.4 historia
2. COMPUERTAS LÓGICAS
2.1 compuerta and, or, not, separador, nand, nor
2.2 lógica negativa, lógica positiva
3. CONEXION Y COMUNICACIÓN
3.1 alámbrica
3.2 inalámbrica
3.3 telefónica
3.4 redes de telefonía
4. ORIGEN DE LOS ROBOTS
4.1 autómatas
4.2 control por computador
4.3 introducción al control del sistema
AGRADECIMIENTOS:
Expreso mis sinceros agradecimientos al ingeniero Álvaro valencia por su arduo trabajo en la enseñanza de los conocimientos adquiridos también a mi madre por su acompañamiento que tuvo durante el trabajo y el gran esfuerzo.
CIRCUITOS INTEGRADOS
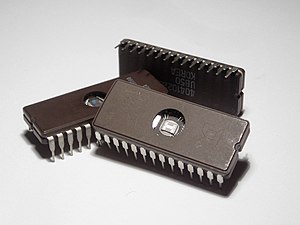
Un circuito integrado (CI), también conocido como chip o microchip, es una estructura de pequeñas dimensiones de material semiconductor, normalmente silicio, de algunos milímetros cuadrados de superficie (área), sobre la que se fabrican circuitos electrónicos generalmente mediante fotolitografía y que está protegida dentro de un encapsulado de plástico o de cerámica. El encapsulado posee conductores metálicos apropiados para hacer conexión entre el Circuito Integrado y un circuito impreso.
Los CI se hicieron posibles gracias a descubrimientos experimentales que mostraban que artefactos semiconductores podían realizar las funciones de los tubos de vacío, así como a los avances científicos de la fabricación de semiconductores a mediados del siglo XX. La integración de grandes cantidades de pequeños transistores dentro de un pequeño espacio fue un gran avance en la elaboración manual de circuitos utilizando componentes electrónicos discretos. La capacidad de producción masiva de los circuitos integrados, así como la fiabilidad y acercamiento a la construcción de un diagrama a bloques en circuitos, aseguraba la rápida adopción de los circuitos integrados estandarizados en lugar de diseños utilizando transistores discretos.
Los CI tienen dos principales ventajas sobre los circuitos discretos: costo y rendimiento. El bajo costo es debido a los chips; ya que posee todos sus componentes impresos en una unidad de fotolitografía en lugar de ser construidos un transistor a la vez. Más aún, los CI empaquetados usan mucho menos material que los circuitos discretos. El rendimiento es alto ya que los componentes de los CI cambian rápidamente y consumen poco poder (comparado sus contrapartes discretas) como resultado de su pequeño tamaño y proximidad de todos sus componentes. Desde 2012, el intervalo de área de chips típicos es desde unos pocos milímetros cuadrados a alrededor de 450 mm2, con hasta 9 millones de transistores por mm2.
ü Circuitos monolíticos
Los circuitos integrados monolíticos se construyen sobre una plaquita de silicio, denominada sustrato, generalmente de tipo P. Se configura como una unidad inseparable que forma una estructura única, cuyos componentes van formándose simultáneamente, y que no puede ser dividida sin destruir de forma irreversible su función eléctrica. El proceso de fabricación está basado en la técnica planar, vista anteriormente, pudiéndose distinguir en él varios apartados: la preparación de las máscaras fotográficas, la elaboración del circuito y, por fin, el encapsulado y verificación.

ü circuitos híbridos de capa fina
Los circuitos híbridos vienen a cubrir todos aquellos casos en que resulta imposible utilizar un circuito integrado por las características propias de la aplicación, además permite otra serie de posibilidades de integración bajo el diseño del cliente (“custom design”) que no ofrece el circuito integrado convencional. Esta interesante alternativa hace que en la práctica el mayor número de modelos que se fabrican de circuitos híbridos correspondan a diseños orientados hacia aplicaciones específicas de clientes y no de tipos estandarizados.

ü circuitos híbridos de capa gruesa
El proceso completo de obtención de un determinado circuito híbrido de película gruesa, comienza con el diseño del circuito electrónico convencional que se desea integrar. A partir de él, se efectúa un prototipo de híbrido con el que se intentan cubrir las características necesarias. Normalmente, aparecen una serie de diferentes propiedades de los componentes en uno u otro caso, así como las diferencias de tamaño, longitudes de pistas y otras consideraciones dimensionales. En muchas ocasiones es preferible hacer una simulación con componentes convencionales sobre circuito impreso, de ciertas características particulares de la película gruesa.

HISTORIA DE LOS CIRCUITOS INTEGRADOS
En abril de 1958, el ingeniero alemán Werner Jacobi1 (Siemens AG) completa la primera solicitud de patente para circuitos integrados con dispositivos amplificadores de semiconductores. Jacobi realizó una típica aplicación industrial para su patente, la cual no fue registrada.
Más tarde, la integración de circuitos fue conceptualizada por el científico de radares Geoffrey Dummer (1909-2002), que estaba trabajando para la Royal Radar Establishment del Ministerio de Defensa Británico, a finales de la década de 1940 y principios de la década de 1950.
El primer circuito integrado fue desarrollado en 1959 por el ingeniero Jack S. Kilby1 (1923-2005) pocos meses después de haber sido contratado por la firma Texas Instruments. Se trataba de un dispositivo de germanio que integraba seis transistores en una misma base semiconductora para formar un oscilador de rotación de fase.
En el año 2000 Kilby fue galardonado con el Premio Nobel de Física por la enorme contribución de su invento al desarrollo de la tecnología.2
Robert Noyce desarrolló su propio circuito integrado, que patentó unos seis meses después. Además resolvió algunos problemas prácticos que poseía el circuito de Kilby, como el de la interconexión de todos los componentes; al simplificar la estructura del chip mediante la adición de metal en una capa final y la eliminación de algunas de las conexiones, el circuito integrado se hizo más adecuado para su producción en masa. Además de ser uno de los pioneros del circuito integrado, Robert Noyce también fue uno de los cofundadores de Intel Corporation, uno de los mayores fabricantes de circuitos integrados del mundo.
COMPUERTAS LÓGICAS
Compuerta AND:
Cada compuerta tiene dos variables de entrada designadas por A y B y una salida binaria designada por x.
La compuerta AND produce la multiplicación lógica AND: esto es: la salida es 1 si la entrada A y la entrada B están ambas en el binario 1: de otra manera, la salida es 0. Estas condiciones también son especificadas en la tabla de verdad para la compuerta AND. La tabla muestra que la salida x es 1 solamente cuando ambas entradas A y B están en 1. El símbolo de operación algebraico de la función AND es el mismo que el símbolo de la multiplicación de la aritmética ordinaria (*). Las compuertas AND pueden tener más de dos entradas y por definición, la salida es 1 si todas las entradas son 1. | |
Compuerta OR:
La compuerta OR produce la función sumadora, esto es, la salida es 1 si la entrada A o la entrada B o ambas entradas son 1; de otra manera, la salida es 0.
El símbolo algebraico de la función OR (+), es igual a la operación de aritmética de suma. Las compuertas OR pueden tener más de dos entradas y por definición la salida es 1 si cualquier entrada es 1. | |
Compuerta NOT:
El circuito NOT es un inversor que invierte el nivel lógico de una señal binaria. Produce el NOT, o función complementaria. El símbolo algebraico utilizado para el complemento es una barra sobra el símbolo de la variable binaria.
Si la variable binaria posee un valor 0, la compuerta NOT cambia su estado al valor 1 y viceversa. . | |
Compuerta Separador (yes):
Un símbolo triángulo por sí mismo designa un circuito separador, el cual no produce ninguna función lógica particular puesto que el valor binario de la salida es el mismo de la entrada.
Este circuito se utiliza simplemente para amplificación de la señal. Por ejemplo, un separador que utiliza 5 volt para el binario 1, producirá una salida de 5 volt cuando la entrada es 5 volt. Sin embargo, la corriente producida a la salida es muy superior a la corriente suministrada a la entrada de la misma. De ésta manera, un separador puede excitar muchas otras compuertas que requieren una cantidad mayor de corriente que de otra manera no se encontraría en la pequeña cantidad de corriente aplicada a la entrada del separador. | |
Compuerta NAND:
Es el complemento de la función AND, como se indica por el símbolo gráfico, que consiste en una compuerta AND seguida por un pequeño círculo (quiere decir que invierte la señal).
La designación NAND se deriva de la abreviación NOT - AND. Una designación más adecuada habría sido AND invertido puesto que es la función AND la que se ha invertido. Las compuertas NAND pueden tener más de dos entradas, y la salida es siempre el complemento de la función AND. | |
Compuerta NOR:
La compuerta NOR es el complemento de la compuerta OR y utiliza el símbolo de la compuerta OR seguido de un círculo pequeño (quiere decir que invierte la señal). Las compuertas NOR pueden tener más de dos entradas, y la salida es siempre el complemento de la función OR.
|
En esta notación al 1 lógico le corresponde el nivel más alto de tensión y al 0 lógico el nivel más bajo, pero que ocurre cuando la señal no está bien definida. Entonces habrá que conocer cuáles son los límites para cada tipo de señal (conocido como tensión de histéresis), en este gráfico se puede ver con mayor claridad cada estado lógico y su nivel de tensión.

Aquí ocurre todo lo contrario, es decir, se representa al estado "1" con los niveles más bajos de tensión y al "0" con los niveles más altos.

CONEXIÓN Y COMUNICACIÓN
REDES INALAMBRICAS
Las redes inalámbricas no es más que un conjunto de computadoras, o de cualquier dispositivo informático comunicados entre sí mediante soluciones que no requieran el uso de cables de interconexión.
En el caso de las redes locales inalámbricas, es sistema que se está imponiendo es el normalizado por IEEE con el nombre 802.11b. A esta norma se la conoce más habitualmente como WI-FI (Wiriless Fidelity).
Con el sistema WI-FI se pueden establecer comunicaciones a una velocidad máxima de 11 Mbps, alcanzándose distancia de hasta cientos de metros. No obstante, versiones más recientes de esta tecnología permiten alcanzar los 22, 54 y hasta los 100 Mbps.

TECNOLOGIAS INALAMBRICAS
Actualmente, las tecnologías de LAN inalámbricas comprenden de infrarrojo (IR), radio de UHF, spread spectrum y radio microondas, que van desde frecuencias en GHz en la región de Europa (900 MHz en los EE.UU.) a frecuencias infrarrojas. La red de comunicación personal (PCN) puede usar una banda CDMA (code-division múltiple Access) compartida, y el servicio celular digital una banda TDMA (time-división múltiple Access). Hay una controversia considerable entre los expertos en el campo, con respecto a los méritos relativos al spread spectrum (CDMA) y la banda-angosta (TDMA) para la red de comunicación privada (PCN). La técnica preferida realmente puede variar con el escenario PCN específico hacia quien va dirigido.

Telefonía
La telefonía móvil o telefonía celular es un medio de comunicación inalámbrico a través de ondas electromagnéticas. Como cliente de este tipo de redes, se utiliza un dispositivo denominado teléfono móvil o teléfono celular. En la mayor parte de Hispanoamérica se prefiere la denominación teléfono celular o simplemente celular, aunque en Cuba se dice de ambas formas, y mientras que en España es más común el término teléfono móvil o simplemente móvil.

Una red telefónica es una red de telecomunicaciones utilizada para llamadas telefónicas entre dos o más partes. Hay varios tipos diferentes de redes de telefonía: Una red de líneas fijas, donde los teléfonos deben estar conectados directamente a una central telefónica.

ORIGEN DE LOS ROBOTS
El 1774, Pierre Jaquet-Droz, describió una máquina autómata, es decir, con movimientos propios. Pero casi 150 años más tarde, en 1920, la idea se transformó en una realidad, gracias al checo Karel Capek, que llamó a su máquina robata, palabra que en el idioma checo que significa trabajo.
En 1956, los ingenieros Engelberger y Devol, habían comprobado que la mitad del trabajo ejecutado por los obreros consistía en llevar materiales de un lugar a otro. Decidieron asociarse con el ingeniero Minks, que era un destacado experto entre quienes experimentaban en máquinas inteligentes. En 1960, nació Shakey, un robot montado sobre ruedas, provisto de una cámara de televisión y de un micro- procesador. Shakey estaba dotado de la capacidad de trasladar objetos pesados de un lugar a otro.
Entonces, los fabricantes del robot, predijeron que los hombres del futuro dispondrían de una mayor cantidad de horas libres para el ocio, puesto que serían reemplazados por las máquinas automáticas. Al comienzo debieron vencerse varias dificultades. Las primeras máquinas tenían un costo entre 40 y 100 mil dólares y la operación-hora del artefacto era de 6 dólares, cantidad superior al salario de un obrero medio. Defendiendo su posición, decían los fabricantes, que desaparecía la necesidad de capacitar al personal: bastaba dotarlo con un nuevo programa.
Además, adujeron, que los robots trabajaban siempre a igual ritmo. No necesitaban vacaciones. No requerían jubilaciones. No sufrían ataques nerviosos. No sufrían accidentes. No perdían tiempo tomando café o yendo al baño. No necesitaban horarios de descanso. No se quejaban ni del frío ni del calor. No sufrían con la radioactividad ni con los gases malignos. Y, sobre todo, no se declaraban en huelga.
La primera industria en utilizar robots fue la automovilística, encabezada por la General Motors. Ya se vaticina que antes que finalice el siglo XX, habrá robots capaces de preparar desayuno o comidas y hasta que reemplazarán a los asesores económicos y financieros, por su enorme capacidad para almacenar información, analizarla y proponer una decisión. Es decir, podrán reemplazar al personal de gerencia. Las posibilidades de tener trabajo, también, disminuirán. Hasta hace pocos años, en California, cada temporada, se necesitaban 40.000 personas para recolectar los frutos de las tomateras. Pero, empleando el robot-cosechador en la recogida de tomates, actualmente, solo se contratan 8.000 trabajadores.
En 1993, ya se calculaba que los robots de la nueva generación, por lo menos, tendrán capacidad para reemplazar a 5 personas.
Autómata
Autómata, del latín autómata y este del griego αὐτόματος autómatos, ‘espontáneo’ o ‘con movimiento propio’. Según la RAE, «máquina que imita la figura y los movimientos de un ser animado», es un equivalente tecnológico en la actualidad; serían los robots autónomos. Si el robot es antropomorfo se conoce como androide.
Históricamente los primeros autómatas se remotan en la prehistoria donde las estatuas de algunos de sus dioses o reyes despedían fuego de sus ojos, como fue el caso de una estatua de Osiris, otras poseían brazos mecánicos operados por los sacerdotes del templo, y otras, como la de Memon de Etiopía emitían sonidos cuando los rayos del sol los iluminaba consiguiendo, de este modo, causar el temor y el respeto a todo aquel que las contemplara. Esta finalidad religiosa del autómata continuará hasta la Grecia clásica donde existían estatuas con movimiento gracias a las energías hidráulicas. Esos nuevos conocimientos quedan plasmados en el primer libro que trata la figura de los robots Autómata escrita por Herón de Alejandría (10 d. C.-70 d. C.) donde explica la creación de mecanismos, muchos basados en los principios de Philon o Arquímedes, realizados fundamentalmente como entretenimiento y que imitaban el movimiento, tales como aves que gorjean, vuelan y beben, estatuas que sirven vino o puertas automáticas todas producidas por el movimiento del agua, la gravedad o sistemas de palancas. También cabe destacar su “The automaton theatre” sobre su teatro de marionetas mecánicas que representaban la Guerra de Troya.

Control por computadora
Hoy en día es posible controlar todos los componentes de un robot desde nuestro PC de forma que el robot incluya los sensores, los controladores y los motores, y el PC pone la "inteligencia" que controla todo el robot y lo mejor de todo es que podemos hacerlo incluso sin cables, vía radio y con tan solo una conexión USB.
Lo primero que hay que tener claro es que lo que tratamos de hacer es un ejemplo de cómo controlar diferentes circuitos y sensores desde nuestro PC, para ello hemos seleccionado algunos de los componentes más populares en los robots y hemos realizado un programa modular en que se muestra como se controla todo. Los circuitos que incluye el robot son:
MD23 Controlador de motores doble de 3 +3 amperios.
SRF02 Sensor de ultrasonidos simple (compatible con el SRF08 y el SRF10)
CMPS03 Sensor brújula digital.
TPA81 Sensor térmico de 8 pixeles.
RLY08 Circuito de control de 8 relés.
LCD03 Display LCD de 4 líneas de 20 caracteres con teclado.
SD21 Circuito de control para 21 servos
La forma y cantidad de circuitos empleados en cada robot depende de cada uno y de sus necesidades, lo que significa que los elementos son opcionales y solo se incluyen a modo de ejemplo. Por ejemplo es posible hacer un robot que solo tenga un controlador de motores MD23 y un sensor de ultrasonidos, o bien que tenga 8 sensores de ultrasonidos y 2 sensores térmicos y nada más, etc. En nuestro caso hemos puesto el necesario para que nuestro prototipo esté lo más completo posible.

l OBJETIVOS :
ü OBJETIVOS GENERALES: Adquirir conocimientos sobre las maquinas térmicas y demás.
ü OBJETIVOS ESPECÍFICOS: llegar al término de máquinas térmicas y aprender sobre ellas.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comentarios
Publicar un comentario